Authors
Evan Krause and Michael Zillich and Tom Williams and Matthias Scheutz
Venue
28th AAAI Conference on Artificial Intelligence
Publication Year
2014
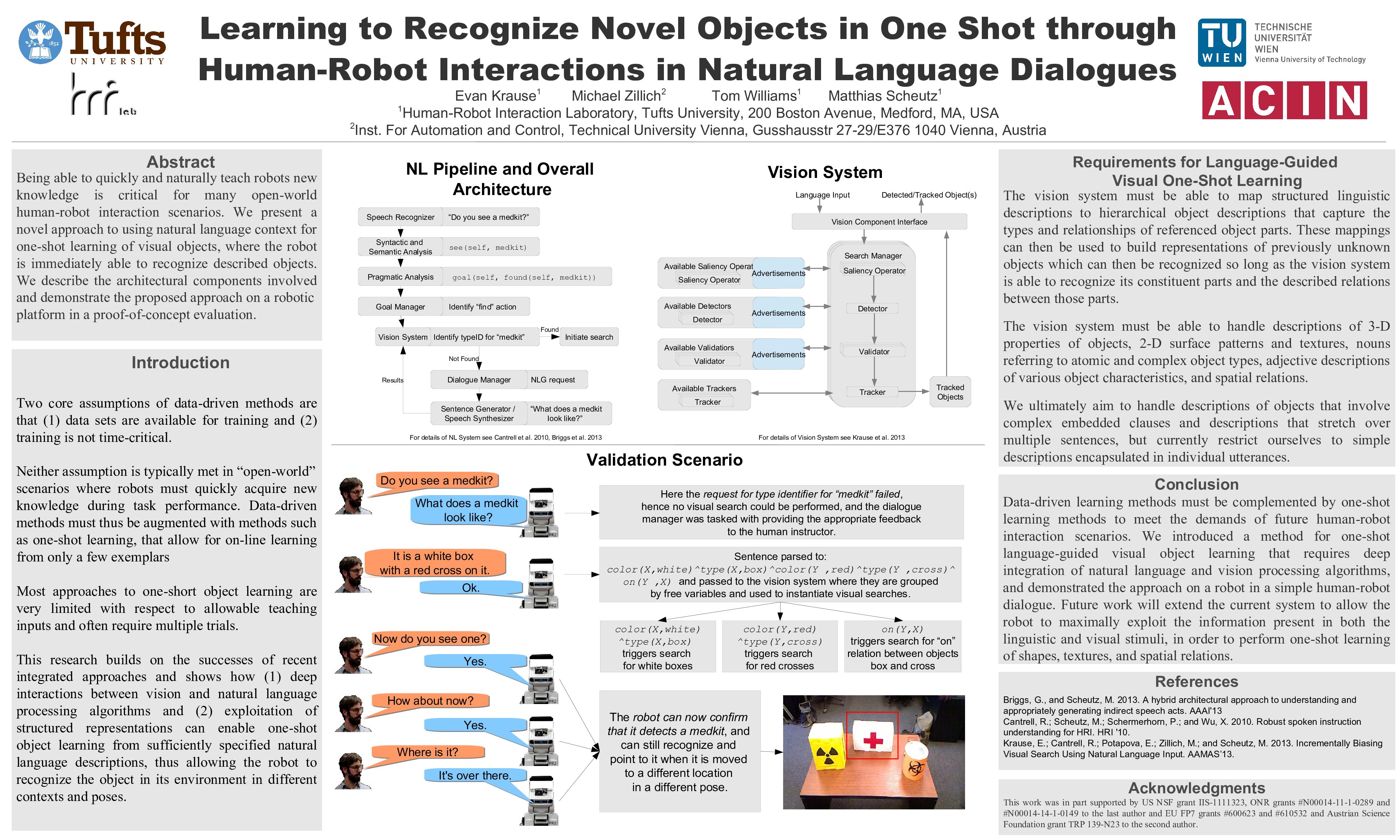
Being able to quickly and naturally teach robots new knowledge is critical for many future open-world human-robot interaction scenarios. In this paper we present a novel approach to using natural language context for one-shot learning of visual objects, where the robot is immediately able to recognize the described object. We describe the architectural components and demonstrate the proposed approach on a robotic platform in a proof-of-concept evaluation.