Authors
Tom Williams, Gordon Briggs, Bradley Oosterveld, Matthias Scheutz
Venue
29th AAAI Conference on Artificial Intelligence
Publication Year
2015
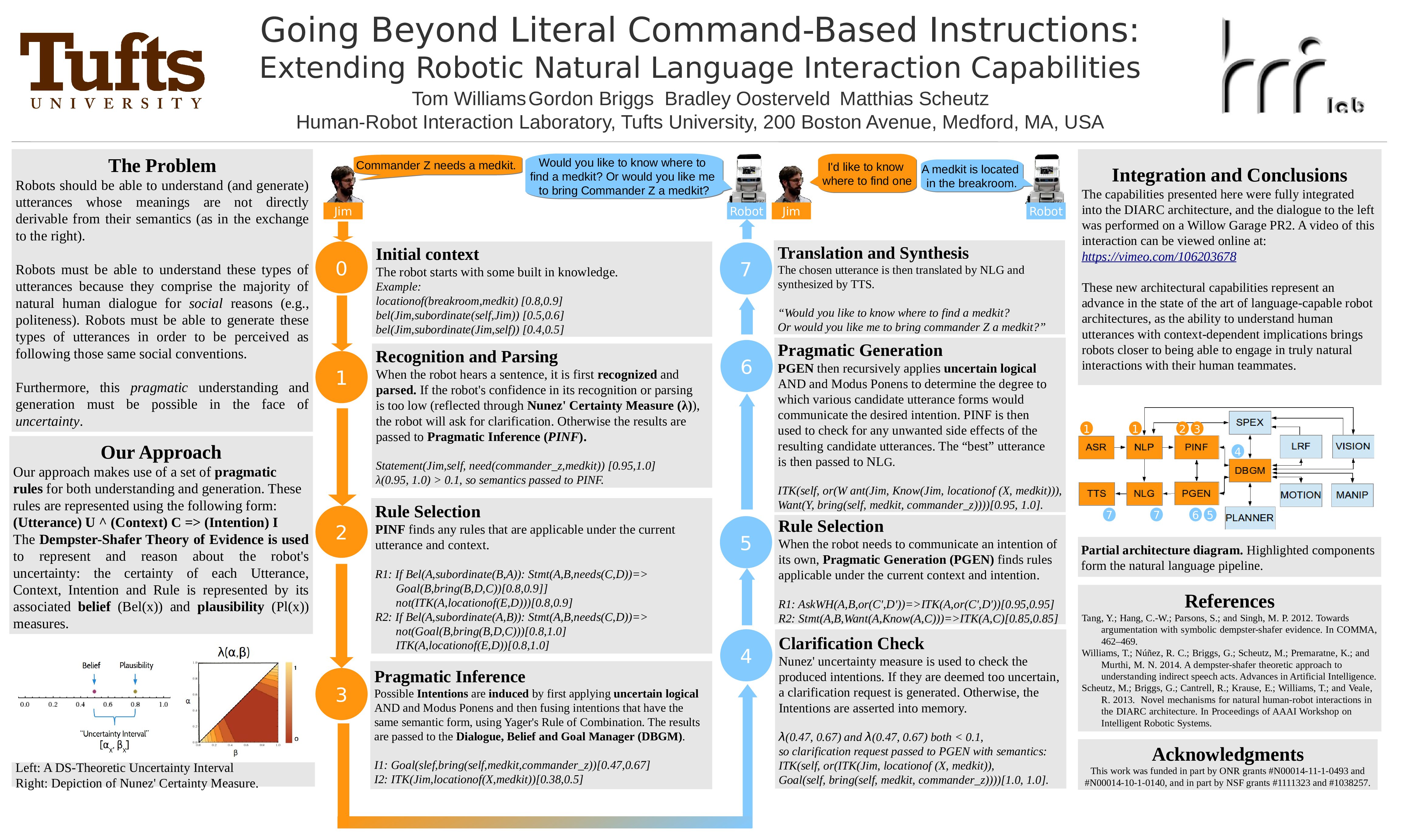
The ultimate goal of human natural language interaction is to communicate intentions. However, these intentions are often not directly derivable from the semantics of an utterance (e.g., when modulations are employed to convey politeness, respect, and social standing). Robotic architectures with simple command-based natural language capabilities are not equipped to handle more liberal, yet natural uses of linguistic exchanges. In this paper, we propose novel mechanisms for inferring intentions and generating clarification requests based on Dempster-Shafer theory, which will permit robots to cope with a much wider range of task-based natural language interactions. We demonstrate the potential of these inference algorithms for natural human-robot interactions on a mobile robot running as part of an integrated cognitive robotic architecture in a dialogue-based instruction task.